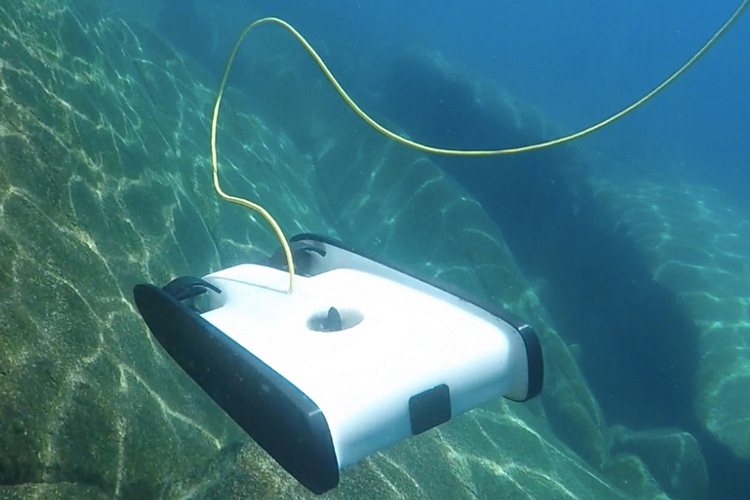
OpenROV made the news rounds a couple years back for their open-source underwater drone, which managed to successfully equip amateur ocean explorers with their own swimming robots. This time around, they’re back crowdfunding for a new and improved version called the OpenROV Trident.
Faster, more durable, and more maneuverable than its predecessor, OpenROV claims the new drone “combines the versatility and control of an ROV (Remotely Operated Vehicle)” with “the efficiency of an AUV (Autonomous Underwater Vehicle).” I don’t exactly know what that combo means, but we’ll just assume it makes for an awesome drone that you can use to explore marine life, sunken ships, and, possibly, Atlantis.
The big change for the OpenROV Trident is the new hydrodynamically-offset thruster design that allows the drone to move according to the pace you need. That means, it can pitch at high speeds if you want to map an area or rapidly search a section of water, as well as maneuver delicately when navigating close quarters or when thoroughly searching an area. It can also dive into depths of up to 100 meters (328 feet), travel at speeds of up to 6.5 feet per second, and operate for up to three hours at a time.


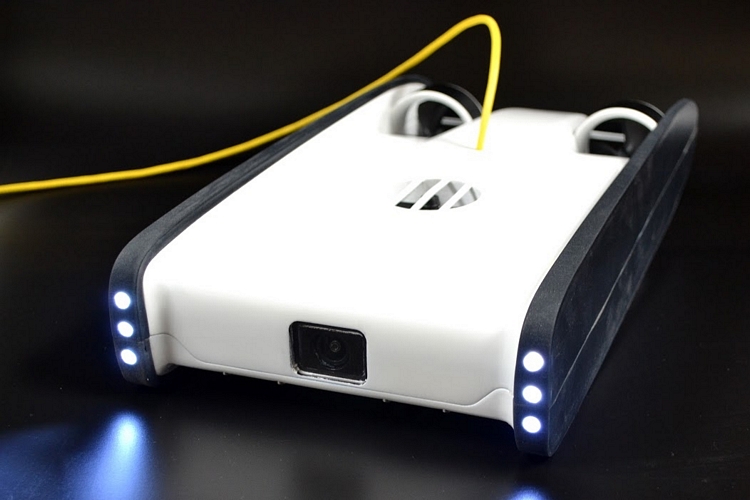
During use, a towable bouy to which the drone is tethered (the tether doubles as a data line) transmits signals between the pilot and the drone (via long-range WiFi), enabling the pilot to operate the drone remotely and the drone camera to transmit data back to home base. Software for operating the drone is available for both tablets and PCs.
A Kickstarter campaign is currently running to fund the OpenROV Trident. Unfortunately, the lower pledge levels are all gone, with available pledges now starting at $949.